
|
|
|
|
|
|
IJRR, In Preparation |
|
|
|
 |
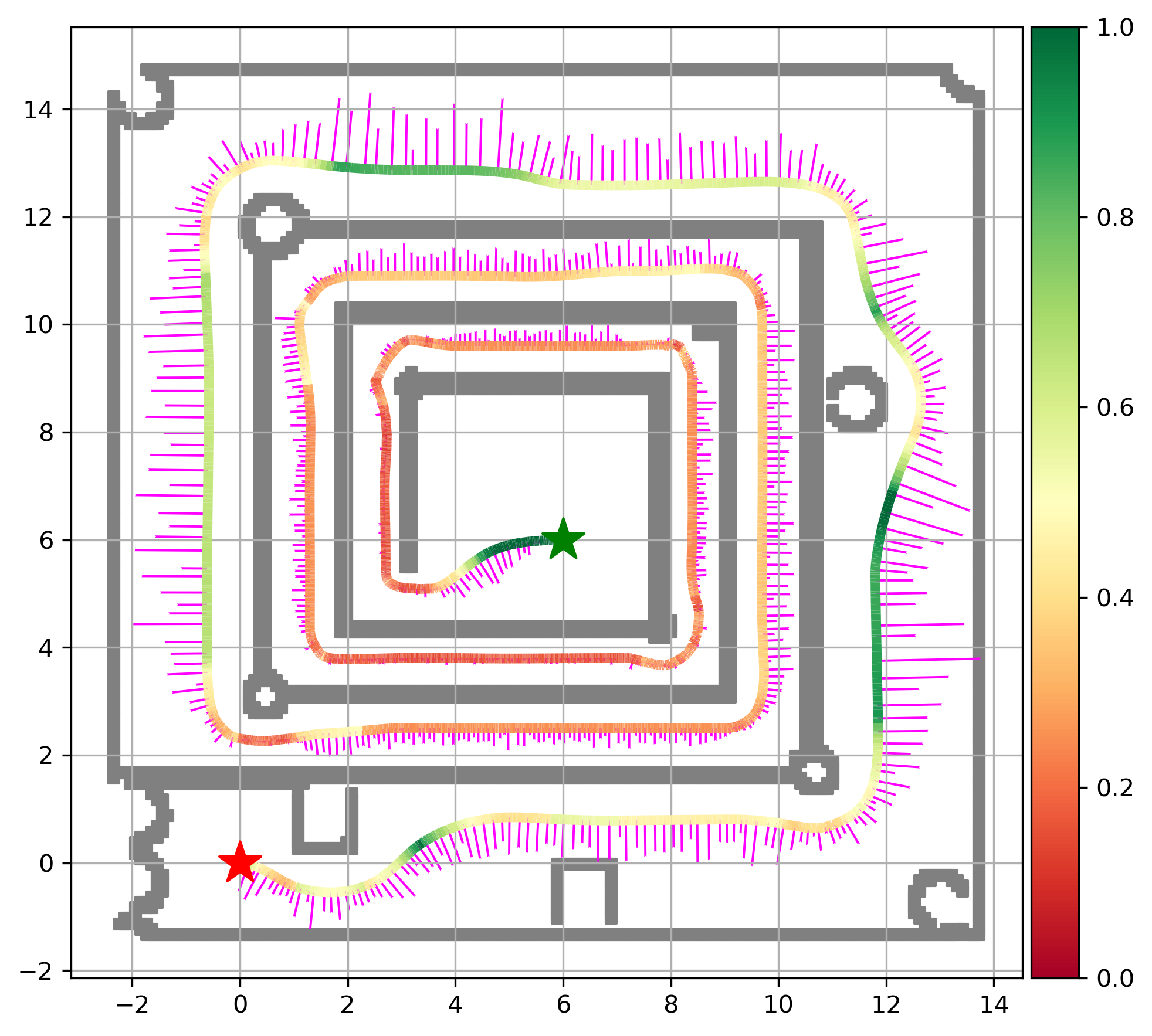
Zhichao Li, Yinzhuang Yi, Zhuolin Niu, Nikolay Atanasov EAST: Environment Aware Safe Tracking using Planning and Control Co-Design To be submitted to IJRR. [arXiv] |
|
Jackal UGV navigates in an unknown large-scale cluttered working space (video playing at 2x speed). During this experiment, goal position (green dot) is updated occassionaly by remote operator using RViz. |
|
Jackal UGV navigates around static and moving obstacles (human actors wearing helmets with vicon marker). Actors are instructed to intentionally block the way vehicle, but not being adversial in long-time horizon. |

Algorithm comparision: Ours vs. EVA Planner (Quan. Lun, et al. 2021)
|
|
|
Acknowledgements |